#include <IRremote.hpp>
#include <OneWire.h>
#include <DallasTemperature.h>
#include <Arduino.h>
#include <TM1637Display.h>
// Data wire is plugged into port 2 on the Arduino
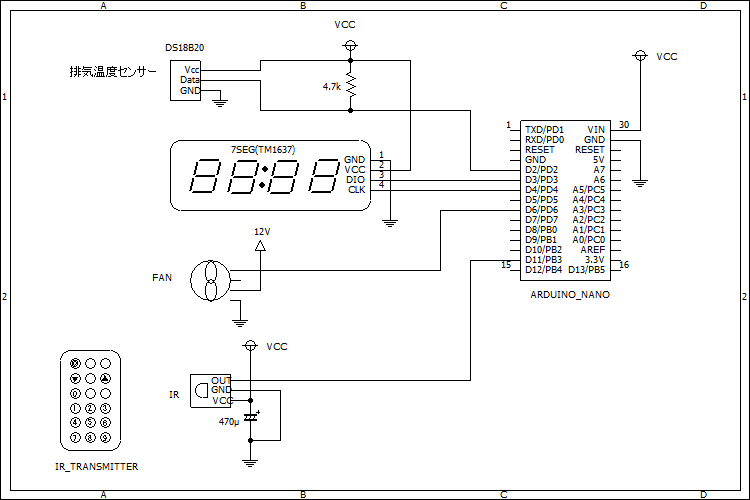
#define ONE_WIRE_BUS 2 //温度センサー
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
// Module connection pins (Digital Pins)
#define CLK 4
#define DIO 3
TM1637Display display(CLK, DIO);
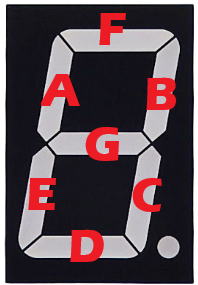
const byte ___C[] = {
SEG_D, // _
SEG_D, // _
SEG_D, // _
SEG_A | SEG_E | SEG_F | SEG_D, // C
};
const byte ___F[] = {
SEG_D, // _
SEG_D, // _
SEG_D, // _
SEG_A | SEG_E | SEG_F | SEG_G, // F
};
int IR_RECEIVE_PIN = 11;
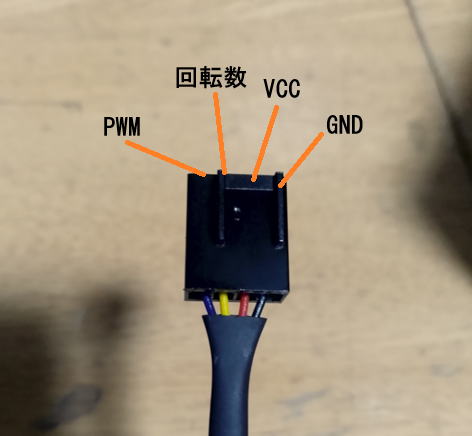
int PWMfan=6;
int fan_vol=255;
int countt=50;
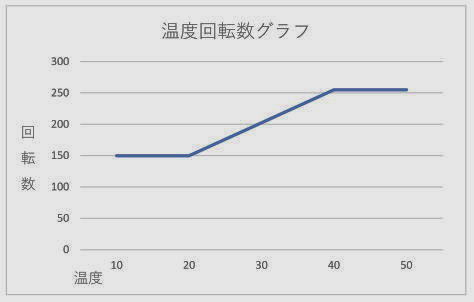
int fan_min=150;
float temp_min=20;
float temp_max=39;
int hflgg=0;
void setup() {
Serial.begin(9600);
IrReceiver.begin(IR_RECEIVE_PIN);
pinMode(PWMfan,OUTPUT);
sensors.begin();
}
int ccomand;
void irjyusin(){
if (IrReceiver.decode()) {
switch(IrReceiver.decodedIRData.command){
case 0x50:
Serial.println("選局上");
if (temp_max<50){
temp_max=temp_max+1;
Serial.print("設定温度:");
Serial.println(temp_max);
hyouji(temp_max);
}
break;
case 0x51:
Serial.println("選局下");
if (temp_max>25){
temp_max=temp_max-1;
Serial.print("設定温度:");
Serial.println(temp_max);
hyouji(temp_max);
}
break;
case 0x65:
Serial.println("音声ON");
hflgg=1;
break;
case 0x64:
Serial.println("消音");
hflgg=0;
display.clear();
break;
}
IrReceiver.printIRResultShort(&Serial);
Serial.println();
IrReceiver.resume();
}
}
void keisoku(){
sensors.requestTemperatures(); // Send the command to get temperatures
float atai=sensors.getTempCByIndex(0);
// Check if reading was successful
if (atai != DEVICE_DISCONNECTED_C)
{
Serial.print("計測値:");
Serial.println(atai);
hyoujic(atai);
float ans=(((255-fan_min)/(temp_max-temp_min))*(atai-temp_min))+fan_min;
if (ans>255){ans=255;}
if (ans<150){ans=150;}
fan_vol=ans;
Serial.print("ファン出力:");
Serial.println(fan_vol);
analogWrite(PWMfan,fan_vol);
}
else
{
Serial.println("Error: Could not read temperature data");
}
}
void hyoujic(float Temp){
if(hflgg==0){return;}
String ss = String(Temp);
ss.replace(".", "");
// Serial.println(ss);
String sss = String(ss.charAt(0))+String(ss.charAt(1))+String(ss.charAt(2));
display.clear();
display.setBrightness(0x01); //MAX 0x0f
display.setSegments(___C); // - or blank
display.showNumberDecEx(sss.toInt(),0x40,true,3,0);
}
void hyouji(float Temp){
if(hflgg==0){return;}
String ss = String(Temp);
ss.replace(".", "");
// Serial.println(ss);
String sss = String(ss.charAt(0))+String(ss.charAt(1))+String(ss.charAt(2));
display.clear();
display.setBrightness(0x01); //MAX 0x0f
display.showNumberDecEx(sss.toInt(),0x40,true,3,0);
}
void hyoujik(int kaiten){
if(hflgg==0){return;}
String ss = String(kaiten);
ss.replace(".", "");
// Serial.println(ss);
String sss = String(ss.charAt(0))+String(ss.charAt(1))+String(ss.charAt(2));
display.clear();
display.setBrightness(0x01); //MAX 0x0f
display.setSegments(___F); // - or blank
display.showNumberDecEx(sss.toInt(),0,true,3,0);
}
void loop() {
irjyusin();
delay(100);
countt=countt-1;
if(countt==25){
hyoujik(fan_vol);
}
if(countt<1){
keisoku();
countt=50;
}
}