| 上位に戻る | 初版2025/9/28 |
| 上位に戻る | 初版2025/9/28 |
Bluetoothを使ってスマホをリモコンにしてホバークラフトのラジコン模型を作ってみました
ラジコン模型(グライダーとか船を作っていた)は、小中学生以来 久々だあ
孫もおらんしなあ即刻ゴミになる
まあ新規で買ったのは、発泡スチロールと、モータだけだけど
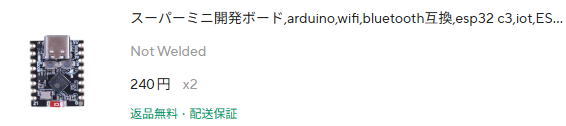 |
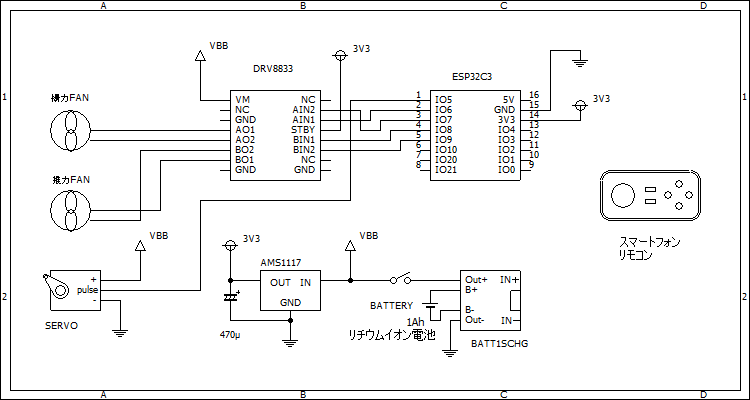
マイコン本体 アンテナ内蔵 |
 |
モータドライバ |
 |
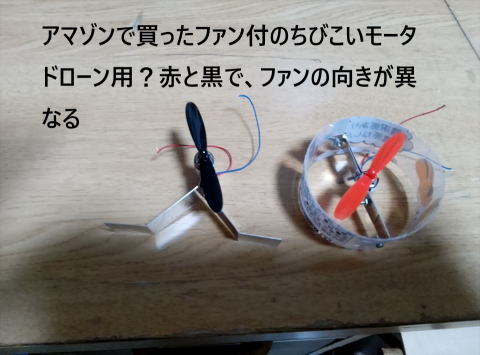
羽付モータ |
 |
充電保護 ユニット |
 |
|
 |
|
 |
 |
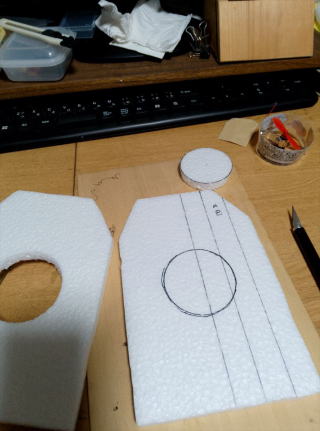
ダイソーで買った、厚さ10mmの発泡スチロール を使いました |
 |
ホバークラフトのスカート部をチャック付の ポリ袋を使いました サイズは、B6 |
 |
発泡スチロールをポリ袋より、5mmくらい 小さめに切り出します 0.3mmのステンレス線に電気流して 熱線できりましたが、結構真っすぐ切るのが ムズイです 新品歯のカッターナイフで切ったほうが 加工しやすいみたいです |
 |
一番下部は、周囲20mmを残して切り抜き ました |
 |
上部2枚は、揚力ファンの穴を開けました |
 |
出来上がった底面 後部のスカートの膨らみが悪いです チャックの部分が硬いので、スカート 前部よりも長めに出したほうがいいかも です |
 |
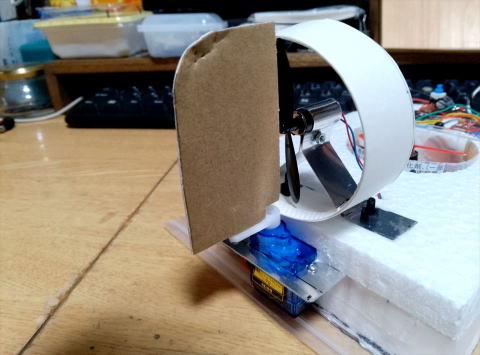
0.3mmのアルミパネルを使って モータを固定しています 円筒形のプラスチックは、 飲み物の空きコップを使って います |
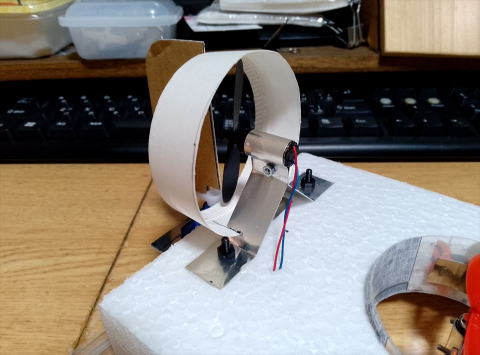 |
推進モータを取り付けた ところ、プラスチックネジで 挟みこみ ファンのカバーは紙コップ です |
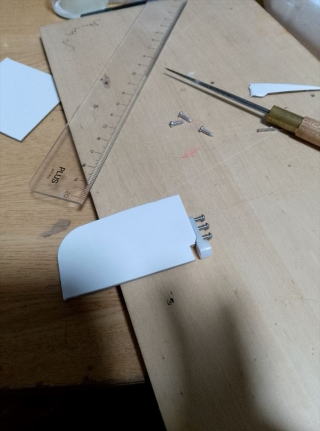 |
ラダーは、薄いダンボール を切り出して サーボのガイドにから2mm のネジをダンボールの隙間に ねじ込んでいます |
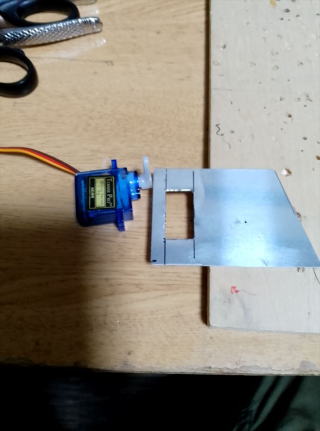 |
0.5mmのアルミ板に サーボモータを取付ました |
 |
ラダー 愛猫に、噛まれて 猫の歯型がついてます 取れなくて良かったス |
 |
ポリ袋を底面に合わせて 切り抜きます 20mmの両面テープで 貼り付けました |
 |
空き箱の紙に各ユニットを 両面テープで貼り付けて います 右上が、ESP32C3Mini 左上がモータドライバ 右下SWと、レギュレータ 左下 リチウム電池の 保護充電ユニット |
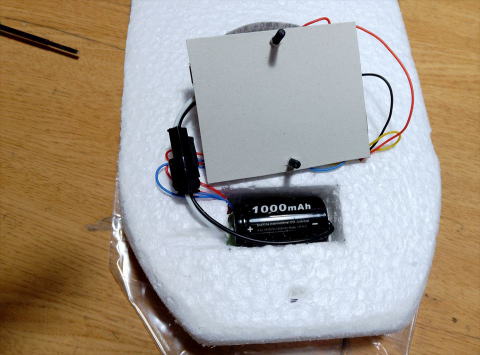 |
ユニットの下は、電池です これが一番重いので、 これの実装位置で 重心が中央になるように 配置します |
 |
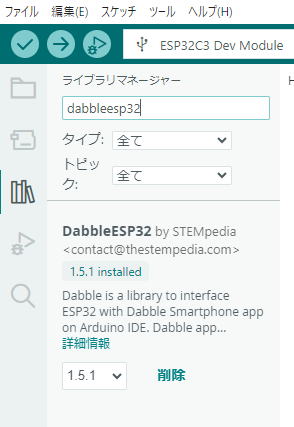
Google Playストアで、 dabble app で検索して 左記アプリを インストールします |
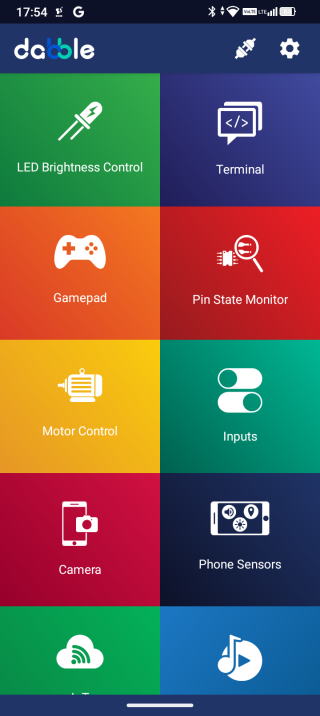 |
起動すると、左記のような メニューが表示されます 今回は、Gamepadを使 います |
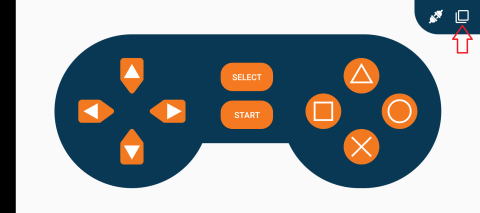 |
Gamepadを選択すると Digital Padが開きますので 右上の□ボタンを押します |
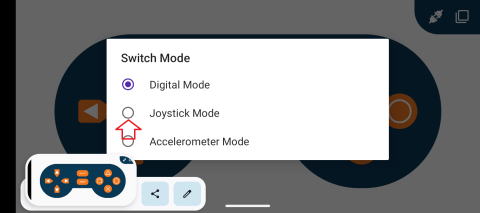 |
モードの選択画面になります ので、Joystickモードを 選択します |
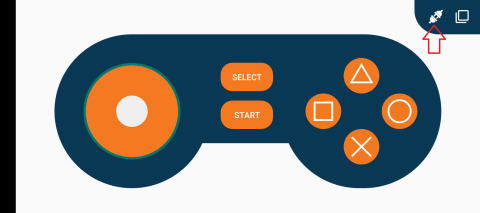 |
Bluetoothで、ESP32と接続 するには、 接続アイコンを選択します |
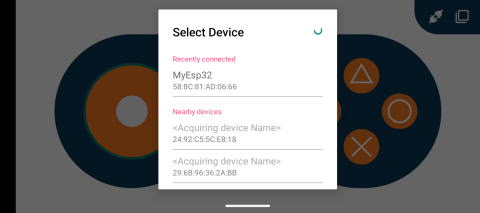 |
ESP32が起動していれば、 一覧に出ますので選択 することで接続します |