#include <Servo.h>
#include <MsTimer2.h> //7セグ表示をタイマー割込で試験動作 未使用
#include <OneWire.h>
#include <DallasTemperature.h>
// Data wire is plugged into port 2 on the Arduino
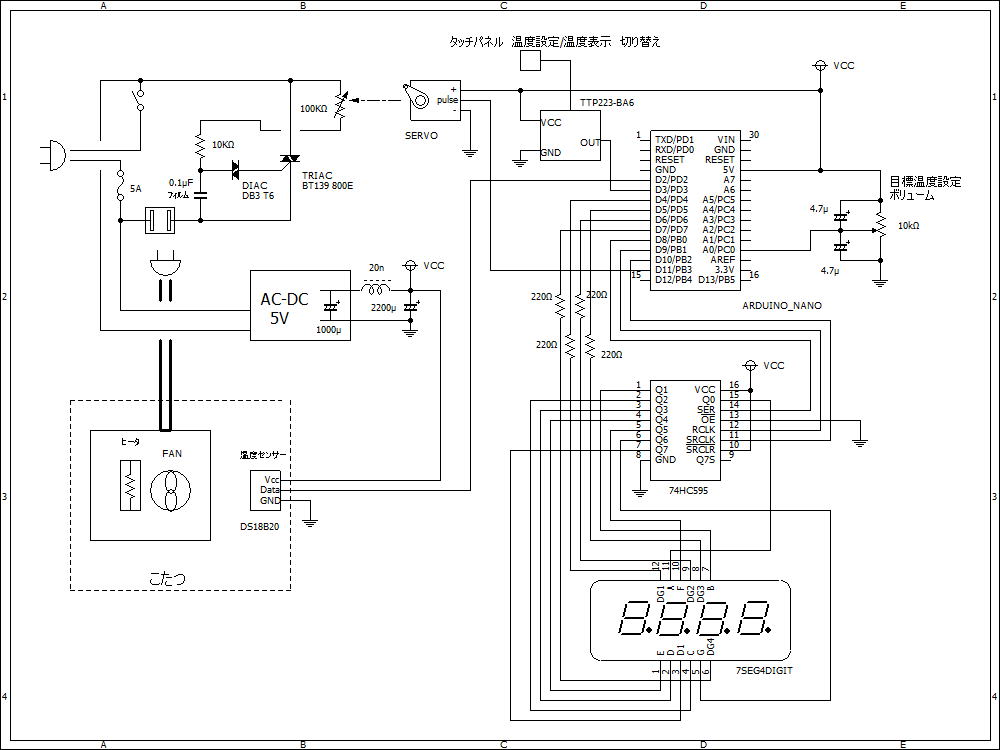
#define ONE_WIRE_BUS 2 //温度センサー
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
Servo myservo; // create servo object to control a servo
int latch=9; //74HC595 pin 9 STCP
int clock=10; //74HC595 pin 10 SHCP
int data=8; //74HC595 pin 8 DS
int P_DIG1=4; //7セグ4桁目
int P_DIG2=5; //7セグ3桁目
int P_DIG3=7; //7セグ2桁目
int P_DIG4=6; //7セグ1桁目
int sww=3; //タッチスイッチ 切り替え用
int potpin = 0; //ボリュームピン アナログ
int val; //ボリューム変数
int val1; //サーボ出力値
int sondo=250; //温度変数
int mondo=250; //目標温度
int countt=1; //桁カウンター
int xx;
int ondoco=100;
float sensatai;
// PID定数設定 ===============
int KP = 20; // Pゲイン
int KD = 5; // Dゲイン
float KI = 0.05; // Iゲイン
// PID変数 ===============
int e_pre = 0; // 微分の近似計算のための初期値
float ie = 0; // 誤差の積分
float e_ie; //誤差積分今回値
float de; //誤差の微分
int e; //誤差変数
int e_per; //誤差前回値
float out; //制御出力値
int TT=5; //周期5秒
unsigned char table[]=
{0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c
,0x39,0x5e,0x79,0x71,0x00,0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef,0xf7,0xfc,0xb9,0xde,0xf9,0xf1,0x80};
void setup() {
pinMode(latch,OUTPUT);
pinMode(clock,OUTPUT);
pinMode(data,OUTPUT);
pinMode(P_DIG1,OUTPUT);
pinMode(P_DIG2,OUTPUT);
pinMode(P_DIG3,OUTPUT);
pinMode(P_DIG4,OUTPUT);
pinMode(sww,INPUT);
digitalWrite(P_DIG1,HIGH);
digitalWrite(P_DIG2,HIGH);
digitalWrite(P_DIG3,HIGH);
digitalWrite(P_DIG4,HIGH);
myservo.attach(11); // attaches the servo on pin 9 to the servo object
sensors.begin();
val = analogRead(potpin); // 設定温度読み出し
mondo = map(val, 0, 1024, 250, 450);
Serial.begin(9600);
//MsTimer2::set(5,ssegu); // 5mS INT タイマー割り込みでテスト用
//MsTimer2::start();
}
//7セグ出力
void Display(unsigned char num)
{
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,table[num]);
digitalWrite(latch,HIGH);
}
//7セグ表示
void ssegu(){
digitalWrite(P_DIG1,HIGH);
digitalWrite(P_DIG2,HIGH);
digitalWrite(P_DIG3,HIGH);
digitalWrite(P_DIG4,HIGH);
switch(countt){
case 1:
if(digitalRead(sww)==HIGH)
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
sondo = map(val, 0, 1024, 250, 450);
mondo=sondo; //設定温度を代入
}else{
//sensatai=sensatai*10;
sondo=(int)sensatai; //計測温度を代入
}
xx=sondo%10; //1桁目を取り出し
Display(xx);
digitalWrite(P_DIG1,LOW);
countt=countt+1;
break;
case 2:
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
xx=sondo/10%10; //2桁目を取り出し
xx=xx+17; //小数点ありの場合
Display(xx);
digitalWrite(P_DIG2,LOW);
countt=countt+1;
break;
case 3:
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
xx=sondo/100%10; //3桁目を取り出し
Display(xx);
digitalWrite(P_DIG3,LOW);
countt=1;
}
}
void loop() {
ssegu(); //1桁表示
delay(5); //1桁表示時間
ondoco=ondoco-1; //カウンタデクリメント
if(ondoco==0){
sensors.requestTemperatures(); // Send the command to get temperatures
sensatai=sensors.getTempCByIndex(0);
sensatai=sensatai*10;
ondoco=1000; //カウンタセット約5秒 1000×5msec
//PID計算開始
e=mondo-sensatai; //誤差計算
de=(e-e_per)/TT; //誤差の微分
e_ie=ie;
ie = ie + (e + e_pre)*TT/2; // 誤差の積分を計算
if((KI*ie)<0){ie=e_ie;Serial.println("低");} //積分値が、制御範囲を超えた場合加算しない
if((KI*ie)>2000){ie=e_ie;Serial.println(KI*ie);} //積分値が、制御範囲を超えた場合加算しない
out = KP*e + KI*ie + KD*de; // PID制御の式にそれぞれを代入
e_pre = e;
//動作確認用
Serial.print("誤差:");
Serial.print(e);
Serial.print(" 誤差微分:");
Serial.print(de);
Serial.print(" 誤差積分:");
Serial.print(ie);
Serial.print(" 出力:");
Serial.println(out);
if(out<0){out=0;} //出力値設定範囲を超えた場合制限
if(out>2000){out=2000;} //出力値設定範囲を超えた場合制限
val1 = map(out, 0, 2000, 180, 30);
myservo.write(val1);
}
}